陶瓷微步电机是一种新型仿生式压电执行器,通过多组多维度压电执行器单元按照步进式的多组动作逻辑进行驱动,实现对电机动子的直线驱动。其主要特点是体积小、驱动力大;在静态下可以保持高夹持力,且无热功耗;可以将单步实现高细分,实现纳米级高分辨率;步进式运动方式,可以实现毫米级大运动行程。
非接触式光栅尺可以直接检测运动台面的位移,最大程度避免了间接位移检测带来的位置误差。
陶瓷微步电机可选配真空版本。电机静态下无热功耗,不产生磁场。
|
|
单位 |
公差 |
PMNL-T23-ZT20A |
|
运动轴 |
|
|
Z |
|
运动和定位 |
|||
|
Z轴运动行程 |
mm |
|
±10 |
|
rX轴运动行程 |
deg |
|
±1.1 |
|
rY轴运动行程 |
deg |
|
±1 |
|
传感器 |
|
|
线性光栅尺 |
|
开环分辨率 |
nm |
|
1 |
|
传感器分辨率 |
nm |
|
5 |
|
传感器信号 |
|
|
AqB |
|
Z轴单向重复精度 |
nm |
典型值 |
±50 |
|
rX轴单向重复精度 |
典型值 |
±1.2 μrad (0.25 arcsec) |
|
|
rY轴单向重复精度 |
典型值 |
±1 μrad (0.21 arcsec) |
|
|
Z轴双向重复精度 |
nm |
典型值 |
±100 |
|
rX轴双向重复精度 |
典型值 |
±2.4 μrad (0.5 arcsec) |
|
|
rY轴双向重复精度 |
典型值 |
±2 μrad (0.42 arcsec) |
|
|
速度* |
mm/s |
最大值 |
1 |
|
机械特性 |
|||
|
垂向驱动力 |
N |
典型值 |
200 |
|
垂向保持力 |
N |
最小值 |
300 |
|
驱动性能 |
|
|
|
|
工作电压 |
V |
|
-250~250V |
|
其他 |
|||
|
工作温度范围 |
°C |
|
0~50 |
|
材料 |
|
|
铝合金,不锈钢 |
|
电缆长度 |
m |
±0.02m |
1.5 |
|
电机接口 |
|
|
Sub-D25 公头 |
|
传感器接口 |
|
|
HD-Sub44 公头 |
|
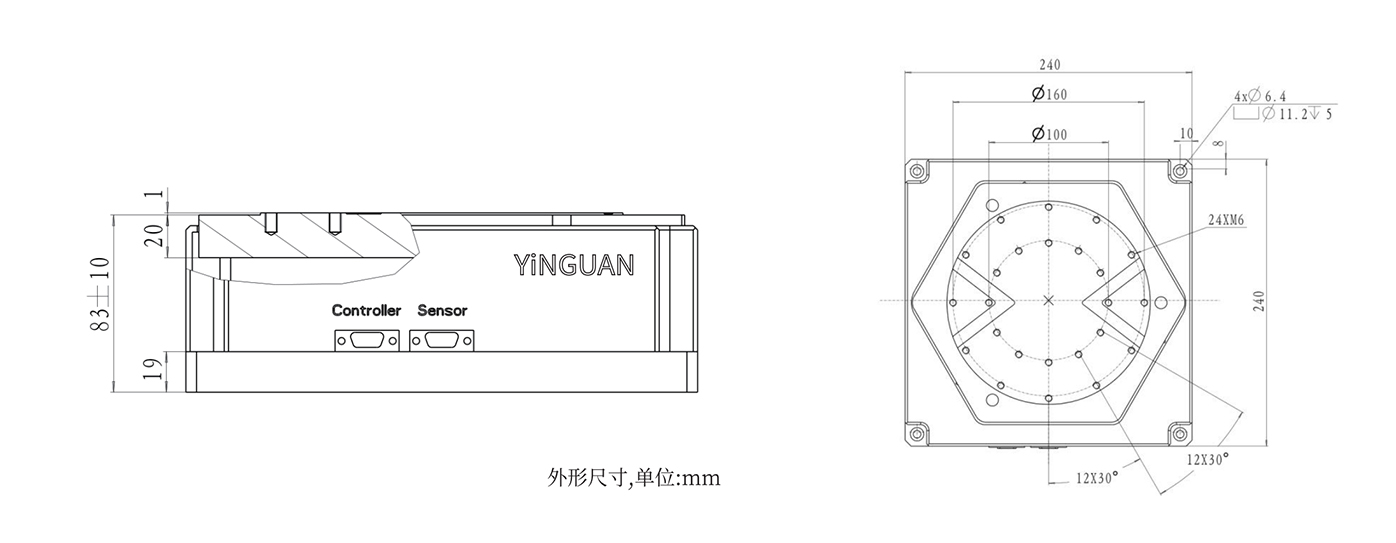
外观尺寸 |
|||
|
长 |
mm |
|
240 |
|
宽 |
mm |
|
240 |
|
高 |
mm |
|
70~96 |
* 实际运动速度取决于驱控电路功率